MDH1系列汽车与火车装运物料体积及密度测量系统(高精度数字云台系统) |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 产品资料: | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 产品图片: | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
MDH1系列汽车与火车装运物料体积及密度测量系统 (高精度数字云台系统)
上海默德电气工程有限公司
上海烨炜自动化技术有限公司 联合出品
一、什么是煤的密度、真相对密度、视相对密度、孔照率和散密度
1.1煤的密度。单位体积煤的质量,单位是g/cm3或kg/m3。学术上多使用密度,而工业上习惯用相对密度。
1.2煤的真相对密度(俗称真密度)。在20℃时,煤(不包括煤中孔隙的体积)的质量与同体积水的质量之比,代表符号是TRD,它是计算煤层平均质量与煤质研究的一项重要指标。
1.3煤的视相对密度(俗称视密度)。在20℃时,煤(包括煤中孔隙的体积)的质量与同体积水的质量之比,代表符号是ARD,在计算煤的埋藏量及煤的运输、粉碎、燃烧等过程都需要用此数据。
1.4煤的孔隙率。根据煤的真密度和视密度可计算出煤的孔隙率,计算公式如下:
真密度-视密度
1.5煤的散密度。是指用自由堆积方法装满容器的煤粒的总质量与容器容积之比,又称堆积密度,单位为t/m3或kg/m3.散密度的测定,可在一定容积的容器中用自由堆积方法装满煤,然后称出煤的质量,再换算成单位体积的质量(t/m3)。在设计煤仓,估计煤堆质量、计算炼焦炉装煤量及计算商品煤的装车质量时,都需用煤的散密度数据。
对同一煤样,煤的真密度数值最大、视密度其次,散密度的数值最小。
二、MDH1-C对汽车入厂煤测量系统的技术要求的响应
2.1.安装位置:
我方满足要求,汽车车厢煤堆测量系统的测量硬件即激光扫描仪安装于汽车入场后,计量前唯一行走路线的正上方。
2.2安装数量:
我方满足要求,安装一套激光测量系统,能够独立完整的完成对汽车车厢煤的测量工作。
2.3测量距离
我方满足要求,该测量系统配置的激光扫描仪测量范围为0-20米。
2.4单次扫描时间
一个汽车车厢单次的测量时间可以满足在10秒以内完成。
2.5扫描频率
扫描仪的单次测量频率为50ms以内,所以满足20HZ的频率要求。
2.6测量精度
扫描仪的测量精度可以达到技术规范书要求。
2.7三维图形的输出
汽车入场煤测量系统能够通过点云建模,然后构建网格,并进行颜色渲染。实现三维可视化视图,并对视图进行多方位的操作。
2.8体积的输出
我方汽车入场煤测量系统能够精确计算出点云坐标,然后通过科学的不规则堆场体积计算方法,精确计算出被测汽车车厢的煤堆体积。
2.9精度的要求
我方汽车入场煤测量系统,通过精确地原始数据采集,精确的现场参数设置和科学的体积计算方法,能够很好实现>=98%的测量精度。
2.10数据的交互
我方汽车入场煤测量系统,可以通过网口通信接口实现与管理平台的发送和接收。把测量的数据和需要获取的数据与管理平台进行实时共享和交互。
2.11数据的保存与查询
我方汽车入场煤测量系统,能够长久保存,留作历史数据,并具备查询功能。
2.12车型的识别
我方汽车入场煤测量系统通过就激光扫描仪测量出来被测汽车的特征点,从而通过特征点分辨出来被测汽车的尺寸等参数,从而分辨出所经过的汽车型号。
三、MDH1-T对火车入厂煤测量系统技术要求的响应
3.1安装位置
我方火车入厂煤测量系统测量模块可以配合轨道衡安装,具体位置为火车经过的正上方。
3.2安装数量
1套,独立完整实现火车车厢盘煤要求。
3.3测量距离
我方火车入厂煤测量系统测量模块为激光扫描仪,可实现0-20米的扫描范围。
3.4测量精度
我方扫描仪满足精度要求。
3.5火车速度
我方火车入厂煤测量系统测量系统在火车5-15km/h的速度情况下能够高密度的实现对火车车厢煤高度的测量。
3.6高度输出
我方火车入厂煤测量系统测量系统能够对火车的高度以m为单位进行计算和输出,可以精确到厘米范围。
3.7高度测量精度
我方满足高度测量精度≥98%的精度要求。
3.8数据交互
我方火车入场煤测量系统,可以通过网口通信接口实现与管理平台的发送和接收。把测量的数据和需要获取的数据与管理平台进行实时共享和交互。
3.9查询功能
我方汽车入场煤测量系统,能够长久保存,留作历史数据,并具备查询功能。
四、产品的介绍
4.1激光测量原理
激光扫描仪是利用时间飞行原理来测量物体的尺寸及形状等工作的一种仪器,激光扫描测量系统基于激光测距原理。通过旋转的光学部件发射形成二维的扫描面,以实现区域扫描及轮廓测量功能。
4.1.1激光单点测距原理:
激光发射器发出激光脉冲波,内部定时器开始计算时间t 当激光波碰到物体后,部分能量返回,当激光接收器收到返回激光波时,停止内部定时器t2,激光雷达到物体的距离为:S=C(光速)×(t2-t1)/2.
4.1.2激光扫描仪测量原理:
激光发射器发出激光脉冲波,当激光波碰到物体后,部分能量返回,当激光接收器收到返回激光波时,且返回波的能量足以触发门槛值,激光扫描器计算它到物体的距离值; 激光扫描器连续不停的发射激光脉冲波,激光脉冲波打在高速旋转的镜面上,将激光脉冲波发射向各个方向从而形成一个二维区域的扫描。此二维区域的扫描可以实现以下两个功能: 1).在扫描器的扫描范围内,设置不同形状的保护区域,当有物体进入该区域时,发出报警信号;2).在扫描器的扫描范围内,扫描器输出每个测量点的距离,根据此距离信息,可以计算物体的外型轮廓,坐标定位等。
4.2激光扫描测量的一般工作步骤
激光雷达技术包含从数据采集到配准,数据的预处理到最后成果的输出和应用等系列过程。
4.2.1外业数据的获取
扫描前需要准备的工作主要包含两部分:一是控制网布设,二是扫描站点布设。而控制网的布设主要考虑到控制点之间的通视性和控制网的几何图形,同时要结合实地不同的情况需要进行合理的选点。在布设好的控制网基础上,可以设立站点,站点的设计既要保证能够完全采集所需要的对象的数据,还要能和控制网联立起来,以便整体距离影像配准及坐标转换。
外业数据扫描就是通过实际的扫描站点布设,根据特征合理的扫描点间距和范围,采集多个视角、多个位置的数据构成完整的目标对象。
4.2.2距离影像的配准
原始数据采集包含不同视点和位置的数据,这些数据需要统一到一个整体的位置,必须要在相邻站点中寻找控制点或类似的公共部分,通过这些特征条件来利用这些约束关系将距离影像配准,最终将所有距离影像统一到基准坐标系中。坐标系统也要根据具体情况而定,一般需要转换到测量坐标系或者是建筑坐标系,或者是空间对象的局部坐标系。
4.2.3数据的预处理
数据预处理包含噪声削减与去除两部分。距离影像的原始数据噪声包含两部分,一部分是由于激光雷达本身在获取对象表面数据过程中,包含有外界不相干目标的遮挡而产生的距离影像数据本身存在的噪声。另一种噪声就是数据配准过程中存在误差产生,最常见的就是数据叠加产生的“厚度” [3],在利用数据之间,需要对这些噪声做一定的处理工作,对于第一类数据噪声通常可以采用手工选择删除的方法,对于后者一般采用重叠区域的重采样或者其它削减的手段。
4.2.4成果制作与输出
激光雷达技术最直接的成果就是整体的距离影像模型和三维的重建模型,影像可制作的成果包含原始的模型、剖面、特征体和数据模型(包含三角网、Nurbs、简单几何模型等)。
4.3用户需求概况
4.3.1在火车和汽车经过的时刻,快速测量出火车和汽车装载货物的体积。
4.3.2其中火车和汽车行进的速度在0公里/小时-15公里/小时的区间范围。
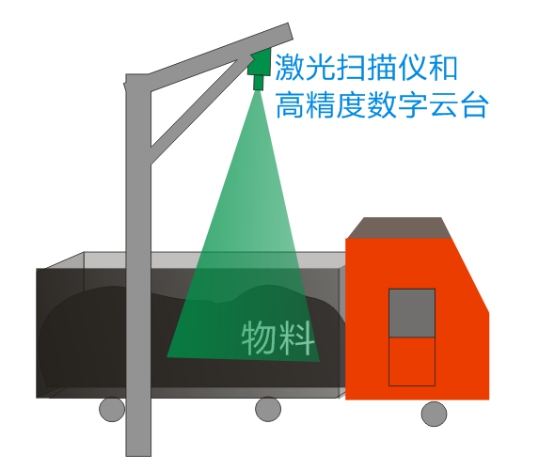
五、汽车入厂测量系统设计方案
5.1系统组成
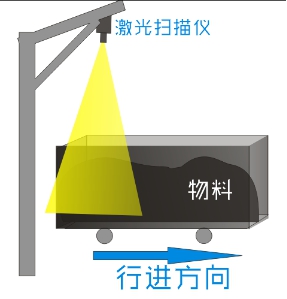
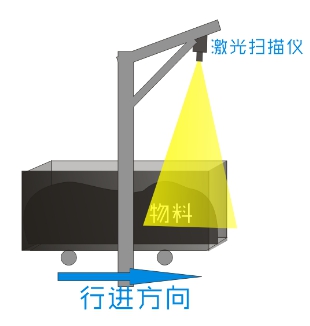
5.2测量工作步骤:将激光扫描仪安装于火车和汽车将要通过的位置的正上方,车辆在行进过程中,通过激光扫描仪扫描正下方的火车或者汽车车厢,获取火车或者汽车车厢的内部及车厢边沿的表面轮廓数据。然后对轮廓数据进行分析处理计算,从而计算出车厢内所装物料的体积。
5.3所需扫描仪技术参数评估:
A、扫描仪黑色物体的最小测距需8m以上。
B、扫描仪最小测量角度1度。
C、扫描仪测量频率10次/秒以上。当火车或者汽车时速15公里/小时的时候,扫描仪的测量间隔约为0.4。可以满足测量体积和生成三维模型的要求。
5.4软件功能
六、火车入厂测量系统设计方案
6.1系统组成
6.2测量工作步骤:将激光扫描仪安装于火车和汽车将要通过的位置的正上方,车辆在行进过程中,通过激光扫描仪扫描正下方的火车或者汽车车厢,获取火车或者汽车车厢的内部及车厢边沿的表面轮廓数据。然后对轮廓数据进行分析处理计算,从而计算出车厢内所装物料的体积。
6.3所需扫描仪技术参数评估:
A、扫描仪黑色物体的最小测距需8m以上。
B、扫描仪最小测量角度1度。
C、扫描仪测量频率10次/秒以上。当火车或者汽车时速15公里/小时的时候,扫描仪的测量间隔约为0.4。可以满足测量体积和生成三维模型的要求。
6.4软件功能
上海烨炜自动化技术有限公司
地址:上海市宝山区真华路926弄3号310大华第三空间写字楼
电话:021-66398462 传真:021-66345266
邮编:200442 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||