斗轮机无人值守全自动作业系统 |
||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
||||||||||||||||||||||||||||||||||||||||||||||||||||
| 产品资料: | ||||||||||||||||||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||||||||||||||
| 产品图片: | ||||||||||||||||||||||||||||||||||||||||||||||||||||
斗轮机无人值守全自动作业系统方案下载目前斗轮机的控制方式基本上分为手动模式以及半自动模式。
手动模式的运行方式:
斗轮机的所有运行机构包括辅助机构,均需要手动逐个操作(如:大车行走、悬臂俯仰、悬臂回转、液压马达、大车夹轨器、悬臂皮带、尾车皮带、裙板挡板等),才可以开始人工手动作业。 手动模式的缺点: 取料时,司机注意力高度集中,操作频繁,劳动强度大,取煤流量稳定控制难度大,取煤效率低。堆料时:堆高难以控制,容易造成皮带磨损,作业时间长容易产生疲劳。夜间或雨雾天气作业,容易产生误判。现场工作环境差。 半自动运行模式的缺点:
堆煤时控制效果还行,边界时还是需要手动干预。取煤时使用效果不理想,煤流控制不稳定,效率不高。无法实现定位中间过程人工干预较多。
斗轮机全自动无人值守系统必要性:
l 减少劳动强度
l 提高效率
l 防止过载多发
l 提高堆煤库容
l 提高系统安全 煤场自动堆取为配煤参数提供基础
1. 斗轮机全自动无人值守系统组成介绍
1.1. 系统组成
l 系统配置1台工控机和1台操作员站、1台触摸屏、1台视频主机。
l 煤控与斗轮机通讯工业级无线网桥通讯,视频监控配置硬盘录像机,5个摄像机。大车位置,悬臂俯仰角度,回转角度由定位检测系统定位。悬臂头部安装料位测量传感器,用来测量堆料料堆高度。
l 悬臂皮带斗轮侧安装流量测量激光扫描仪,用来瞬时煤流量测量。
l 悬臂左右侧安装了两套煤垛检测装置,用来扫描煤堆的形状。
l 大车前后安装了大车行走障碍物监测,当有前方或后方障碍物时,大车停止行走,当障碍物移除后,大车可以继续行走。
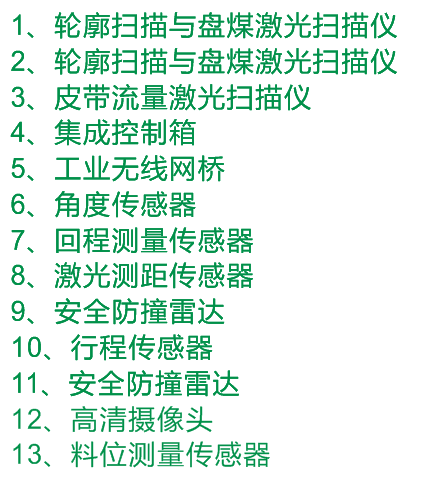
具体组成清单和数量如下表:
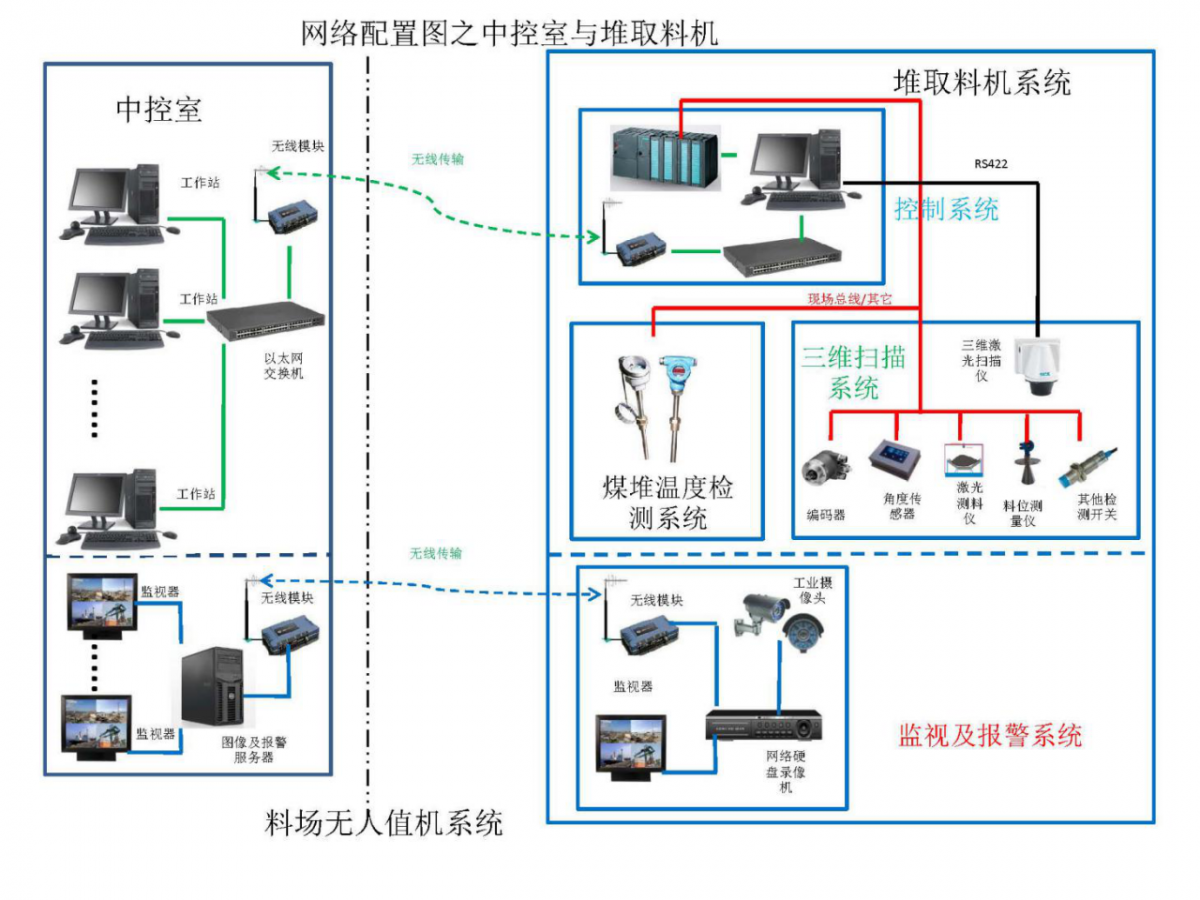
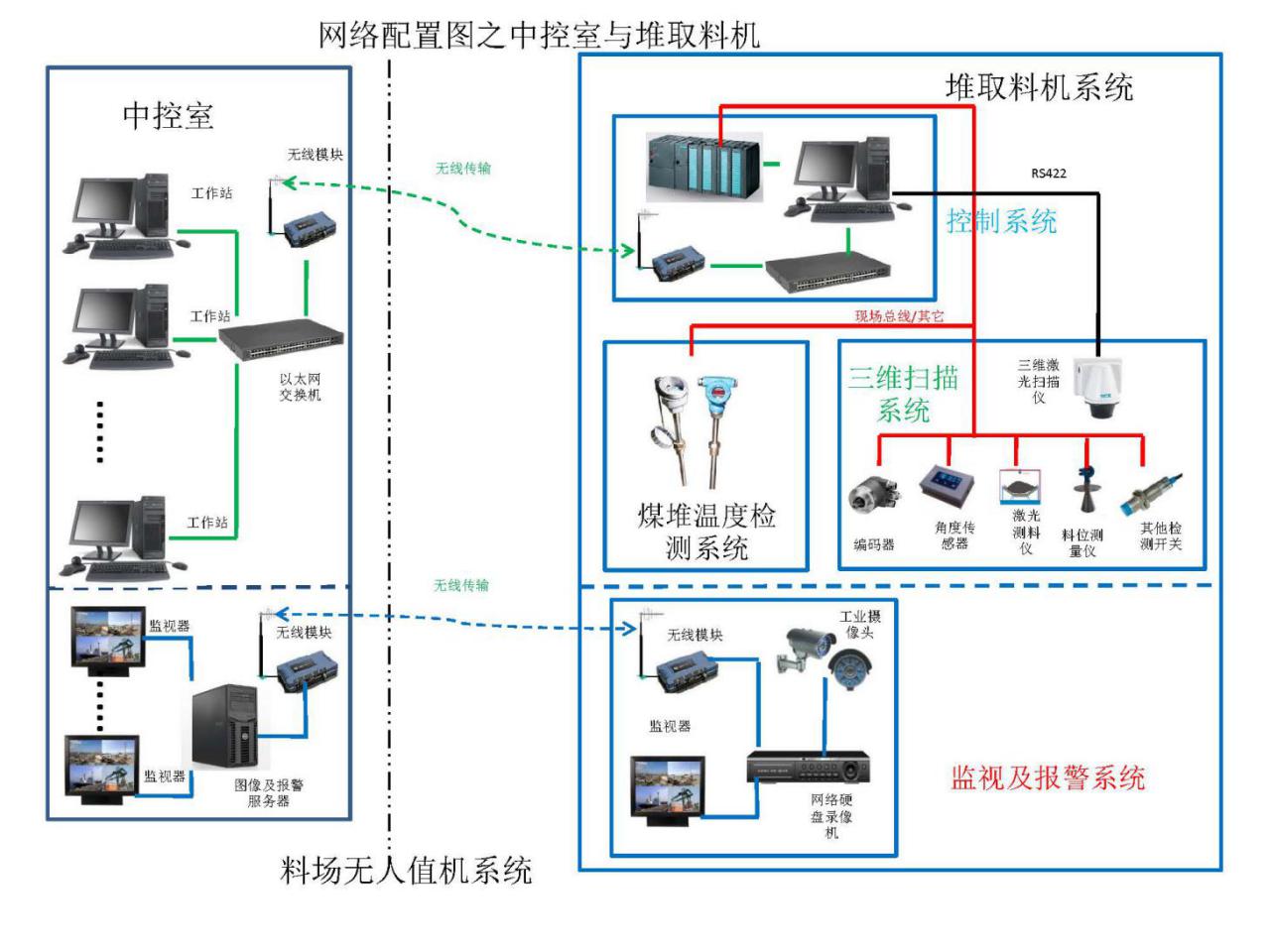
1.2. 系统图
1.3. 现场分布安装图
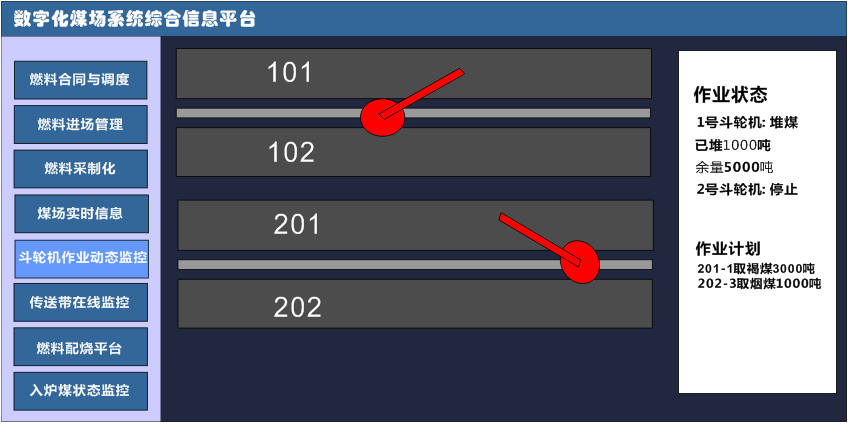
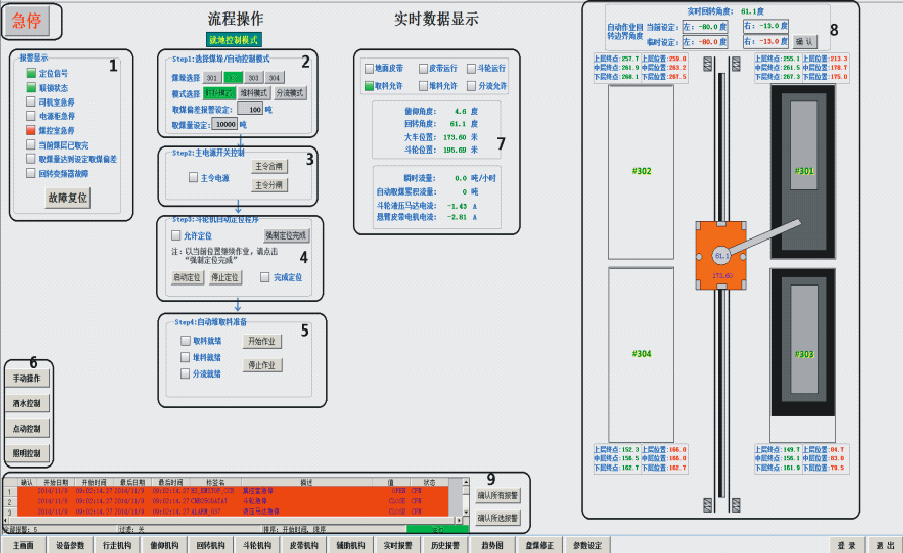
1.4. 煤控中心控制界面图:
|
||||||||||||||||||||||||||||||||||||||||||||||||||||